Home
Product
Embodied
Embodied Tien Kung2.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Embodied World Model
A Visual Language Model for Robots
Data
Embodied AI Data
Application Scenarios
Video
Open-Source Community
News
About Us
简体中文
English
Language
简体中文
English
Home
Product
Embodied
Embodied Tien Kung2.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Wow
PelicanVLM
Data
Application Scenarios
Video
Open-Source Community
News
About
通用具身智能平台
慧思开物
具身大脑
具身小脑
开放SDK
一站式通用具身智能开发平台
立即申请使用
登陆平台
N
应用场景
200
w+
机器人轨迹数据
20
+
机器人本体
-
90
%
开发人力与时间
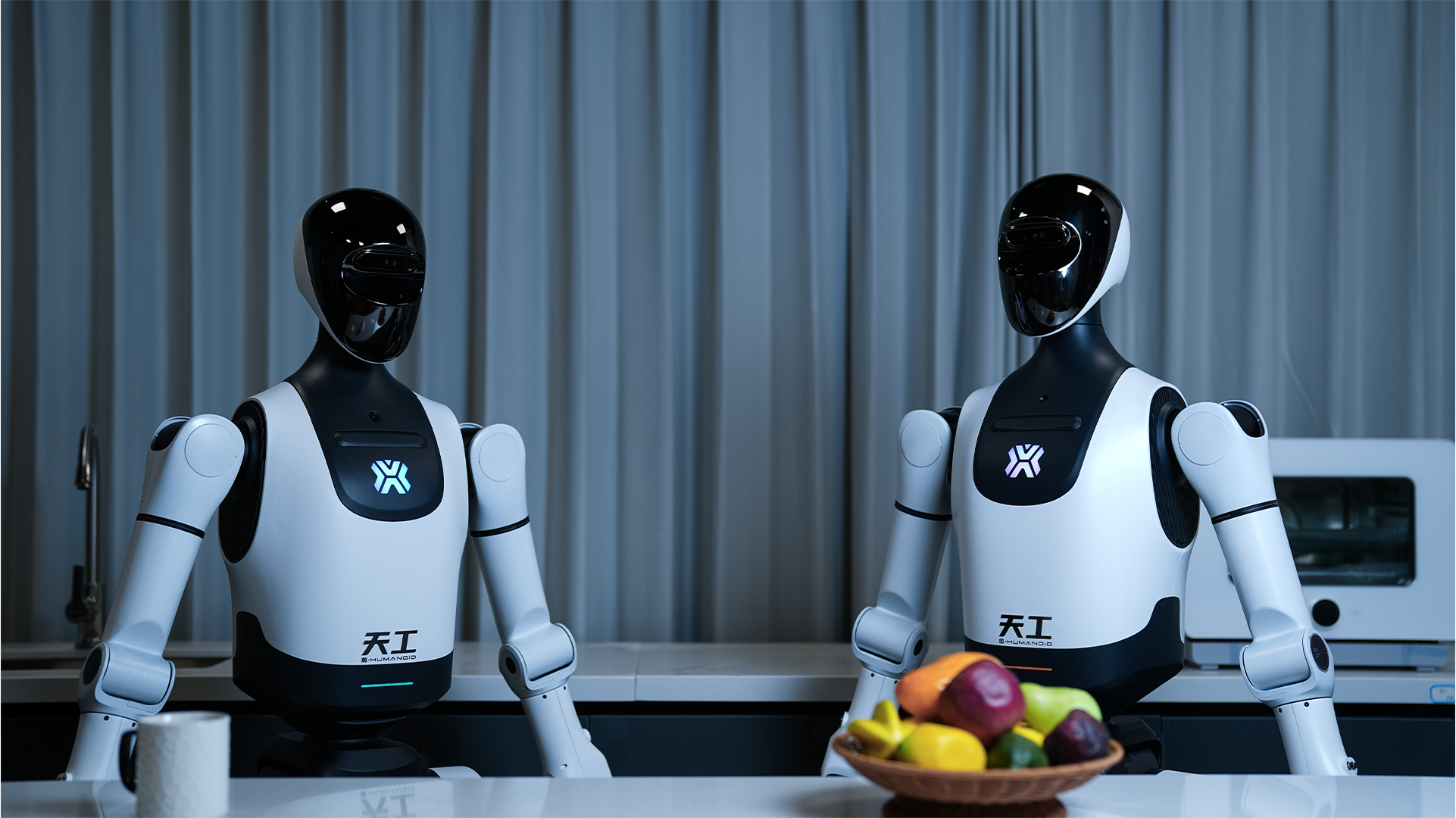
具身大脑
Pelican-VL(天鹅)+WoW(我悟)世界模型双模驱动,让具身拥有智能
Pelican-VL(天鹅)
WoW(我悟)
规模最大、性能最优、时空认知、自我纠错
全新的世界模型框架一唯一能够融合「想象世界→理解物理→生成视频→ 执行动作→再学习」的闭环大模型
具身小脑
VLA模型XR-1
全身控制自我导航
唯一一个通过国家具身智能测评基准ElBench测试的VLA模型,首创多模态视动统一表征
首创OCC环视感知 动态障碍感知 及绕行空间几何感知
慧思开物:开放SDK清单
❮
❯
MCP/RAG框架
FaceID识别
长短记忆
物料箱搬运技能
语音交互
视觉避障
红外传感
边缘计算
多机协同
天铁建图导航
VLM: Pelican
WFM: WoW
低代码工作流GUI
VLA模型
语义分割
实时定位
强化学习
硬件抽象层
Top
©️2024 北京人形机器人创新中心有限公司版权所有|
京ICP备2024078606号
|
京公网安备11011202100775号