Home
Product
Embodied
Embodied Tien Kung2.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Embodied World Model
A Visual Language Model for Robots
Data
Embodied AI Data
Application Scenarios
Video
Open-Source Community
News
About Us
简体中文
English
Language
简体中文
English
Home
Product
Embodied
Embodied Tien Kung2.0
Tian Yi 2.0
Intelligent
HuiSi KaiWu
Wow
PelicanVLM
Data
Application Scenarios
Video
Open-Source Community
News
About
数据闭环一站式平台
多维模型训练:采集-训练-推理-部署全流程闭环,降低训练门槛
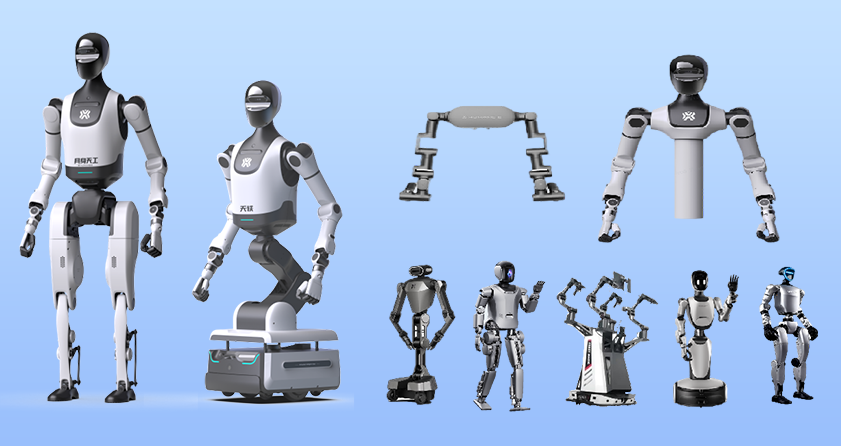
多本体数据采集:兼容轮式、双足人形、夹爪、机械臂、灵巧手等多形态本体
标准化数据处理:支持Bag、Le-robot、HDF5等主流数据格式的标注与转换
平台高扩展性:支持SaaS服务、私有化部署
提供真机数据采集服务
多本体支持:支持主流机器人且可适配客户自研本体
场景资源丰富:海量资源保证数据多样化,提高泛化能力
数据质量高:多模态时间戳对齐,帧率稳定
交付效率开头和场景资源对齐
构建高保真仿真环境
高质量铰链可交互物品
光学动捕验证动力学精准性
极致的多关节动力学表现
高质量场景级数字孪生
数字孪生引擎,面向 Isaac Sim/Lab 开箱即用
多场景模拟,覆盖工业、商业、家庭等场景
动态环境生成,支持参数化场景定制
视觉高保真,照片级真实效果,实时仿真性能
交互模块化,跨场景复用的仿真模型交互
物理高精确,铰链等精准动力学参数
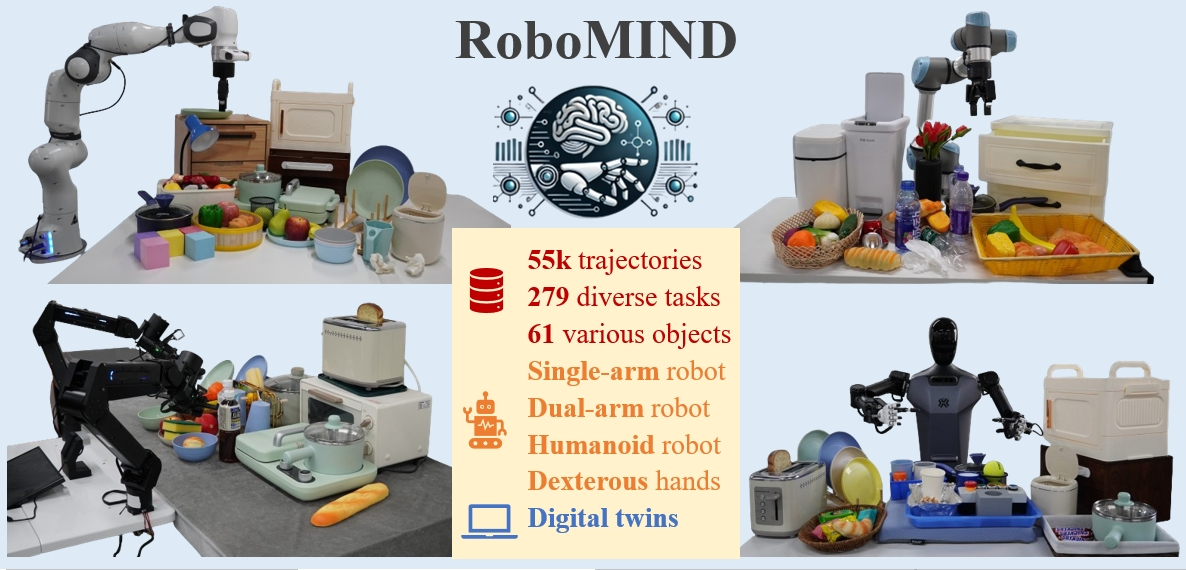
RoboMIND数据集
多构型规范化数据集及Benchmark:RoboMind
包括5类场景96类物体,6类操作包含479项任务,经过多种模型测试结果验证有效,获得行业认可,全平台下载量超7万次,已完成数据商业价值转化验证。
多场景高质量数据采集
Top
©️2024 北京人形机器人创新中心有限公司版权所有|
京ICP备2024078606号
|
京公网安备11011202100775号